







DFRobot Plugable Terminal DFR0055
Универсальный адаптер для датчиков. Упрощает процесс подключения. Перейти к полному описанию
300 руб.
Артикул: 24022548
Наличие: нет в наличии
Обратите внимание, что товара сейчас нет в наличии, но Вы можете оформить предзаказ. Также обращаем Ваше внимание на то, что указана цена на момент наличия товара на складе. Для уточнения актуальной цены обратитесь, пожалуйста, к менеджерам.
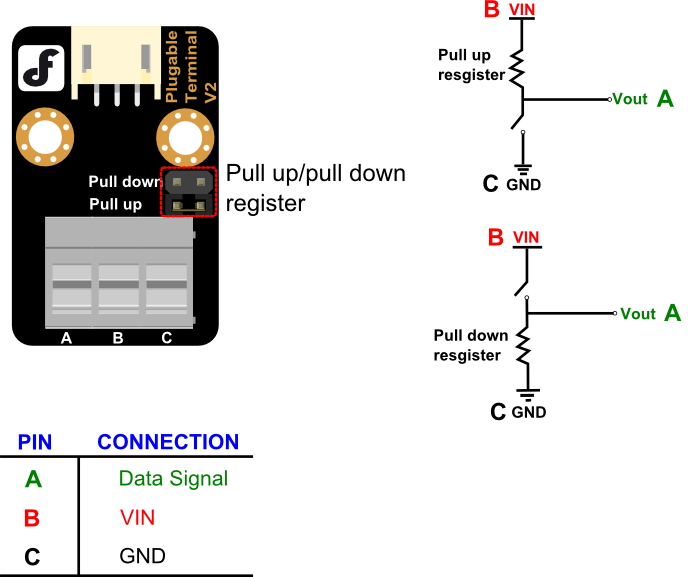
Универсальный адаптер для датчиков. Упрощает процесс подключения.
- Рабочее напряжение: +5V
- Сила тока (максимум): 1A
- Размер: 22x34мм
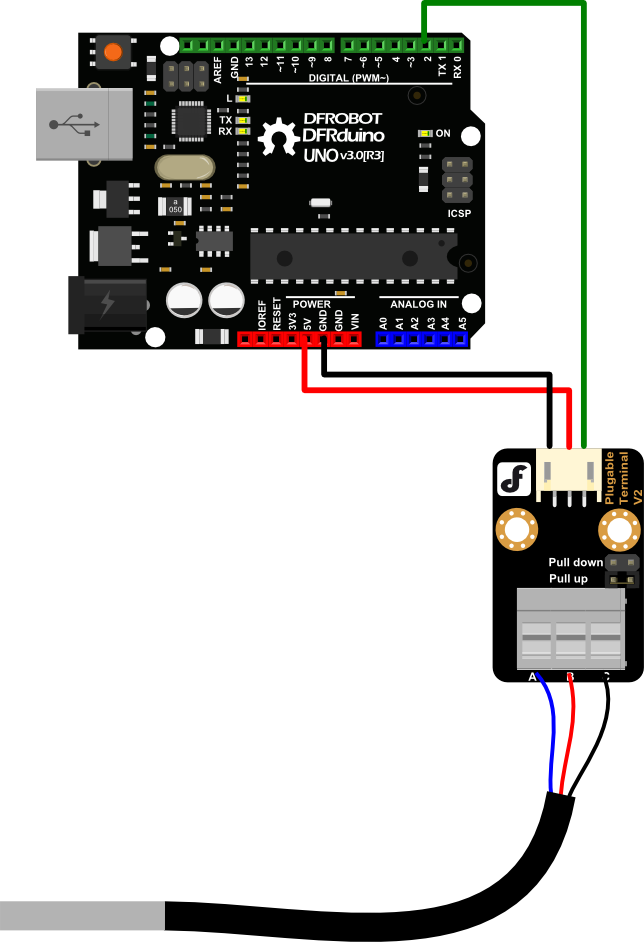
Ниже приведен пример подключения температурного датчика DS18B20
Пример кода
/***************************************************************/
Insturciton:
Connection:
1.Plugable Terminal Sensor Adapter & Waterproof DS18B20 Digital Temperature Sensor
A ----> Blue(DATA SIGNAL)
B ----> RED (VIN)
C ----> Black (GND)
2.Waterproof DS18B20 Digital Temperature Sensor & Arduino board
1(A) ----> Digital Pin2
2(B) ----> 5V/3.3V
3(C) ----> GND
Setting for the Pull-up Register/Pull-down Register Selection Jumpers
When connect DS18B20 with the adapter,please choose to use the
Pull-up Register Jumper
***************************************************************/
#include <OneWire.h>
int DS18S20_Pin = 2; //DS18S20 Signal pin on digital 2
//Temperature chip i/o
OneWire ds(DS18S20_Pin); // on digital pin 2
void setup(void) {
Serial.begin(9600);
}
void loop(void) {
float temperature = getTemp();
Serial.println(temperature);
delay(2000); //just here to slow down the output so it is easier to read
}
float getTemp(){
//returns the temperature from one DS18S20 in DEG Celsius
byte data[12];
byte addr[8];
if ( !ds.search(addr)) {
//no more sensors on chain, reset search
Serial.println("no more sensors on chain, reset search!");
ds.reset_search();
return -1000;
}
if ( OneWire::crc8( addr, 7) != addr[7]) {
Serial.println("CRC is not valid!");
return -1000;
}
if ( addr[0] != 0x10 && addr[0] != 0x28) {
Serial.print("Device is not recognized");
return -1000;
}
ds.reset();
ds.select(addr);
ds.write(0x44,1); // start conversion, with parasite power on at the end
byte present = ds.reset();
ds.select(addr);
ds.write(0xBE); // Read Scratchpad
for (int i = 0; i < 9; i++) { // we need 9 bytes
data[i] = ds.read();
}
ds.reset_search();
byte MSB = data[1];
byte LSB = data[0];
float tempRead = ((MSB << 8) | LSB); //using two's compliment
float TemperatureSum = tempRead / 16;
return TemperatureSum;
}
Загрузка
Загрузка
Ошибка загрузки
{{ $ctrl.loadState$.error.message }}
{{ review.created_at | date }}
- Достоинства
- {{ review.pros }}
- Недостатки
- {{ review.cons }}
- Текст отзыва
- {{ review.text }}
Не было оценок по данному товару
Средняя оценка: {{ $ctrl.rating_avg | number:1 }}
Наш магазин работает в соответствии с Законом РФ "О защите прав потребителей".
В соответствие с п. 4 ст. 26.1 ФЗ «О защите прав потребителей» и п. 21 Постановления Правительства РФ «Об утверждении правил продажи товаров дистанционным способом» потребитель (покупатель) имеет право отказаться от товара (в том числе и надлежащего качества) в любое время до его передачи, а после передачи – в течение 7 дней. При этом, обмен товара надлежащего качества возможен только в случае, если:
- товар не включен в перечень товаров надлежащего качества, не подлежащих возврату утвержденный Постановлением Правительства РФ №55 от 19.01.1998 г.
- товар не был в употреблении
- сохранены фабричные ярлыки, гарантийные талоны, техническая документация, комплектующие детали
- сохранена упаковка товара
- в наличии документы, подтверждающие факт и условия покупки указанного товара (Ст. 25 Закона "О защите прав потребителей").
В случае отказа от товара возврату подлежит уплаченная сумма, за исключением расходов на доставку товара, а также других расходов интернет-магазина, подлежащих компенсации за счет Покупателя (Ст. 26.1 Закона "О защите прав потребителей").
Возвратом и обменом товара занимается тот филиал, в котором была совершена покупка